AMR или AGV: какой тип мобильных роботов выбрать для автоматизации производственных процессов
Выбор технологии мобильных роботов напрямую зависит от специфики производственных задач. AGV оптимальны для стабильных, повторяющихся процессов, где важны точность и предсказуемость, в то время как AMR эффективно работают в динамичной среде, адаптируясь к изменениям планировки и логистики. В ряде проектов наилучший результат обеспечивает комбинированное применение AGV и AMR, позволяющее сбалансировать надежность и гибкость.
Специалисты Crossline анализируют процессы, ограничения и цели производства, чтобы предложить оптимальную конфигурацию мобильных роботов с учетом реальных условий эксплуатации и перспектив развития предприятия.
Что такое AGV
AGV — это мобильные роботы, которые перемещаются по заранее заданным путям или маршрутам. Маршруты могут быть физически маркированы магнитными лентами, проводами, маяками, или визуальными маркерами.
AGV хорошо подходят для предприятий с постоянными процессами и повторяющимися маршрутами, например, в автомобильной промышленности или на крупных фабриках.
Что такое AMR
AMR — это автономные мобильные роботы нового поколения. Они ориентируются с помощью сенсоров, камер и лидаров, используют технологии картографирования (SLAM) и способны динамически прокладывать маршрут.
AMR безопасно взаимодействуют с людьми и оборудованием, объезжают препятствия и легко перенастраиваются под новые задачи. Такие роботы эффективны в динамичной среде — на складах с меняющимися заказами или в распределительных центрах.
AMR vs AGV: ключевые отличия
| AGV | AMR | |
|---|---|---|
| Гибкость маршрутов | Двигается по фиксированной траектории. | Адаптируется в реальном времени. |
| Инфраструктура | AGV требуют установки проводов или лент. | Работает без дополнительных разметок. |
| Безопасность | Может останавливаться, но не всегда способен обойти препятствие. | Обнаруживает препятствия, может объезжать, корректировать путь, уменьшать скорость. |
| Скорость внедрения | Дольше: нужно подготовить инфраструктуру, маршруты, надежность. | Короткие сроки развёртывания, особенно в уже существующих производственных помещениях. |
| Стоимость | Дешевле в простых проектах. | Выгоднее при частых изменениях процессов. |
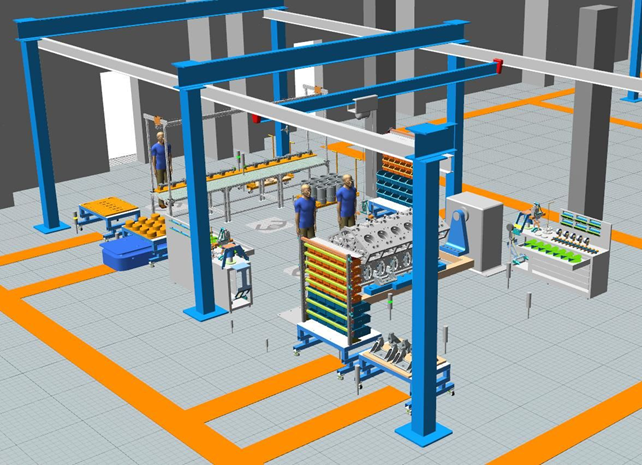
Пример реализации линии сборки дизельных двигателей с применением мобильных роботов
По проекту линия должна обеспечивать полный цикл сборки дизельного двигателя — от получения комплектующих до сборки, испытаний, окраски, консервации и упаковки готовых двигателей, с годовым объёмом выпуска до 400 единиц.
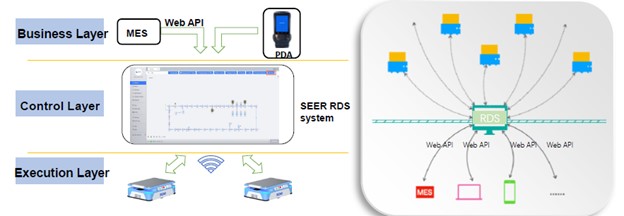
Для автоматизации внутренней логистики использовались самоподъемные автоматизированные тележки SEER AMB-J типа AMR под управлением RDS (Remote Dispatching System) для перемещения комплектующих со склада к постам подсборки.
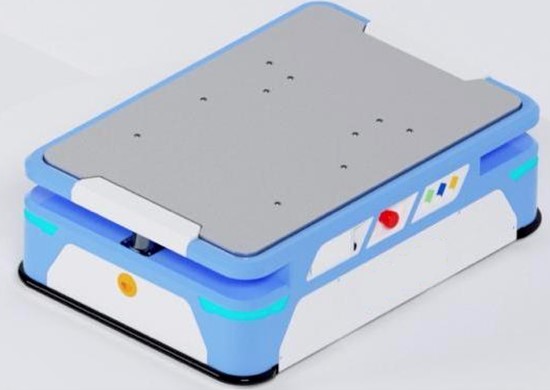
Самоподъемные автоматизированные тележки SEER AMB-J оснащены основным контроллером серии SRC и имеют сверхнизкое шасси.
Грузоподъёмность до 1000 кг, обеспечивают точность позиционирования ±5 мм и безопасно обходят препятствия благодаря лазерной навигации SLAM и 3D-камерам. Управление и обмен данными осуществляется по Wi-Fi.
Описание технологических операций
Автоматизированные транспортные тележки получают задания на перемещение комплектующих из зоны склада к постам сборки и подсборки.
Формирование заданий на перемещение, а также регистрацию движения комплектующих производится автоматически в системе оперативного управления производством.
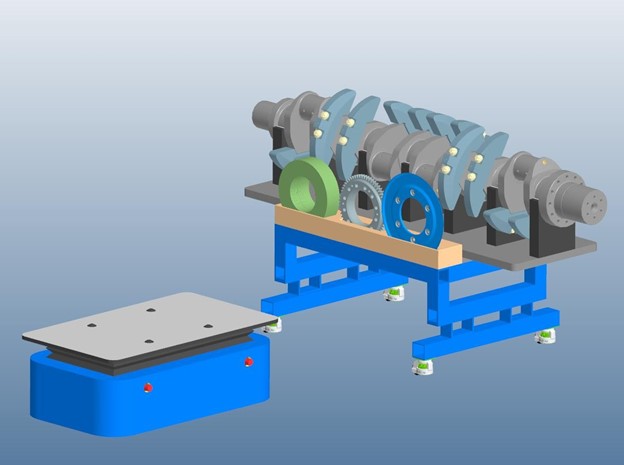
Разработан универсальный транспортный модуль для перемещения ложементов с агрегатами, контейнеров с метизами и РТИ.
Он выполнен в виде сварной П-образной рамы с самоориентируемыми колёсами повышенной грузоподъёмности, имеет коридор для захода автоматизированной тележки, ответные гнёзда под базирующие пальцы её подъёмной площадки и боковые проёмы для стыковки с подъёмными платформами постов основной сборки.